...
Segger Debugger + ARM-JTAG 20-10 pin converter
two Openmotes
a mimsy from Kris
some wires
Please follow the below snapshot on how to connect the wires. (This is using an openbase, and using an openmote would be similar)
...
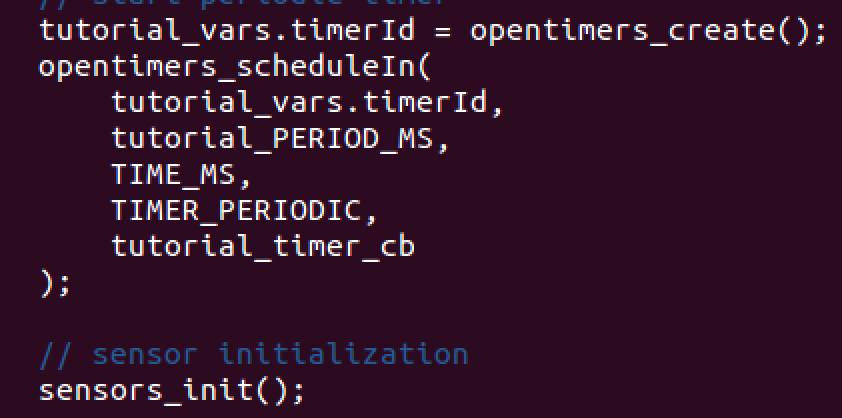
a) Navigate to tutorial.c. Add WKP_UDP_TUTORIAL to tutorial_vars.desc.port. “desc.port” is which UDP port this application will be registered to. “desc.callbackReceive” is the function that is called when a UDP packet is received by the mote. “desc.callbackSendDone” is the function that is called when a UDP packet is done being sent by the mote. “openudp_register()” registers the UDP port and callbacks with the networking stack. “tutorial“tutorial_vars.timerID = opentimers_create()” creates a timer instance. opentimers_schedulein() configures the timer period, type, and callback function.
...
First add the
sensors_init()in thetutorial_init().
add the codes in the red box in the
tutorial_task_cb(). It basically reads the temperature data from the mimsy and sends it out in the separate four bytes in the payload.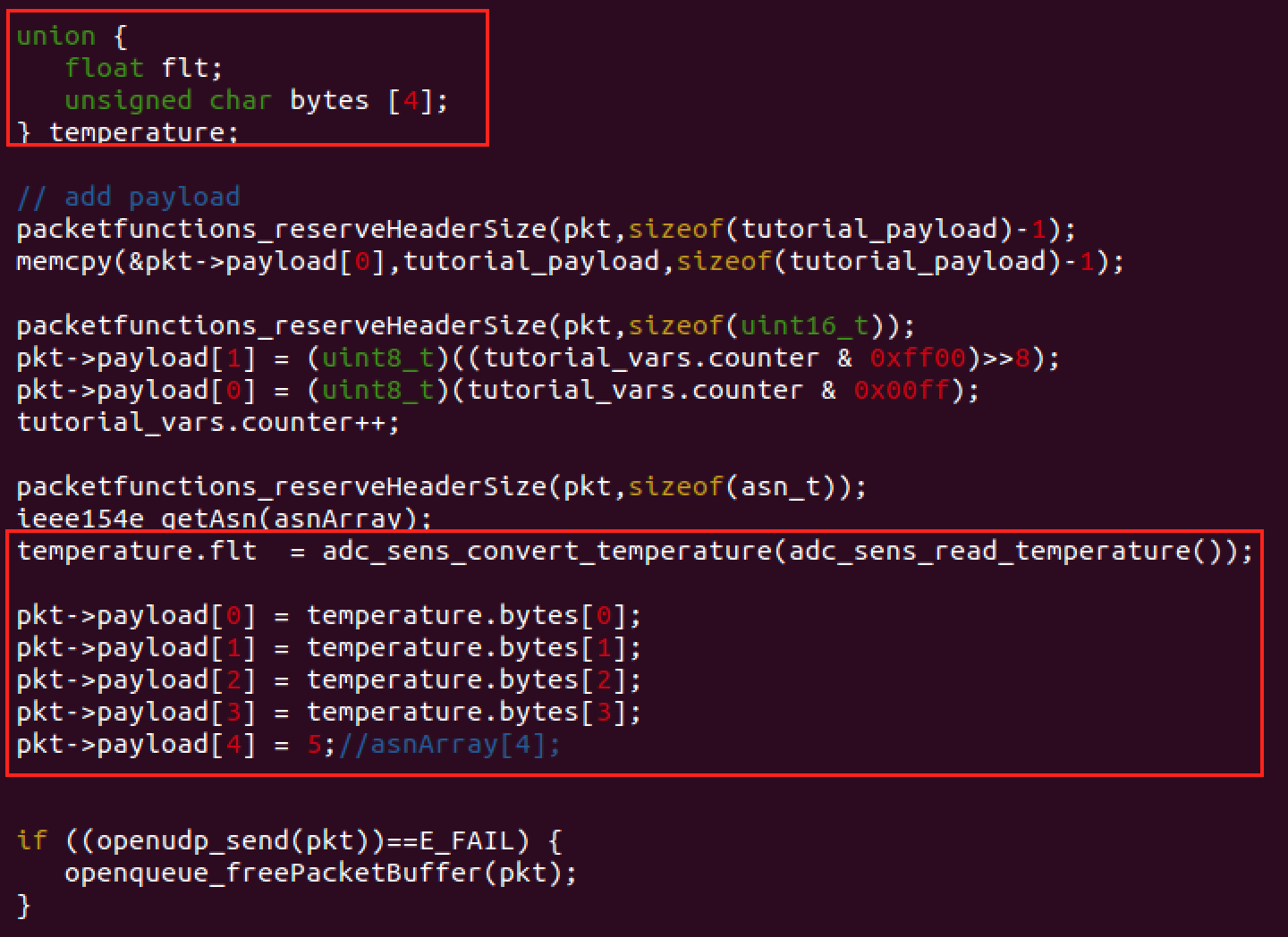
On the PC side, modify
tutorial_dagroot.pyas follows: uncomment line 219 and add the temp_data = … and print out the result.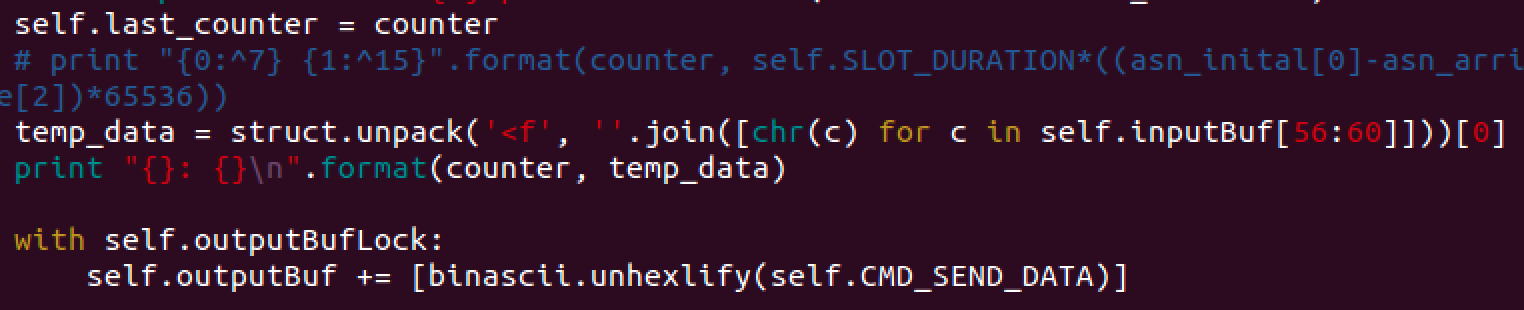
run
sudo python tutorial_dagroot.pyagain and WAIT.
...